Motor driver IM483i
For ongoing project I need to drive a medium power stepper motor with low frequency around few hertz. To avoid spending lot of time reinventing the solution from the scratch I’ve picked commercial driver from the secondary market. It is made by Intelligent Motion Systems Inc. (today called Novanta IMS) located in Marlborough, CT, USA.
Novanta/Intelligent Motion Systems IM483 controller manual
Module I got is old IM483 which has plenty of features packed into 70 mm x 69 mm x 31 mm formfactor. It is capable to use +12 VDC to +48 VDC input voltage and supports motor up to 3 ARMS. Logic drive levels are +5V TTL with opto isolation with support for encoder feedback. There are multiple revisions of these controllers but one I’ll be using was made in 1996 around week 32.
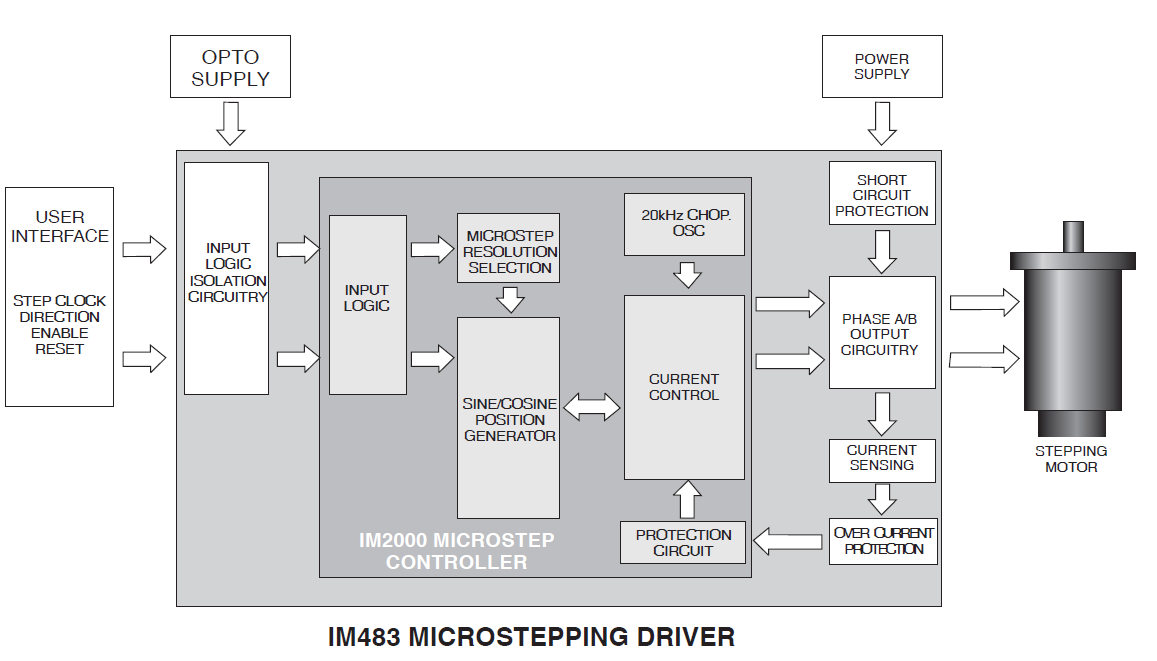
The IM483 has 14 different resolutions (both in binary and decimal) built into the driver. This driver supports microstepping and has 20 kHz chopping rate. Resolution can be changed at any time. There are multiple variants of this controller including remote RS422/232 control options.
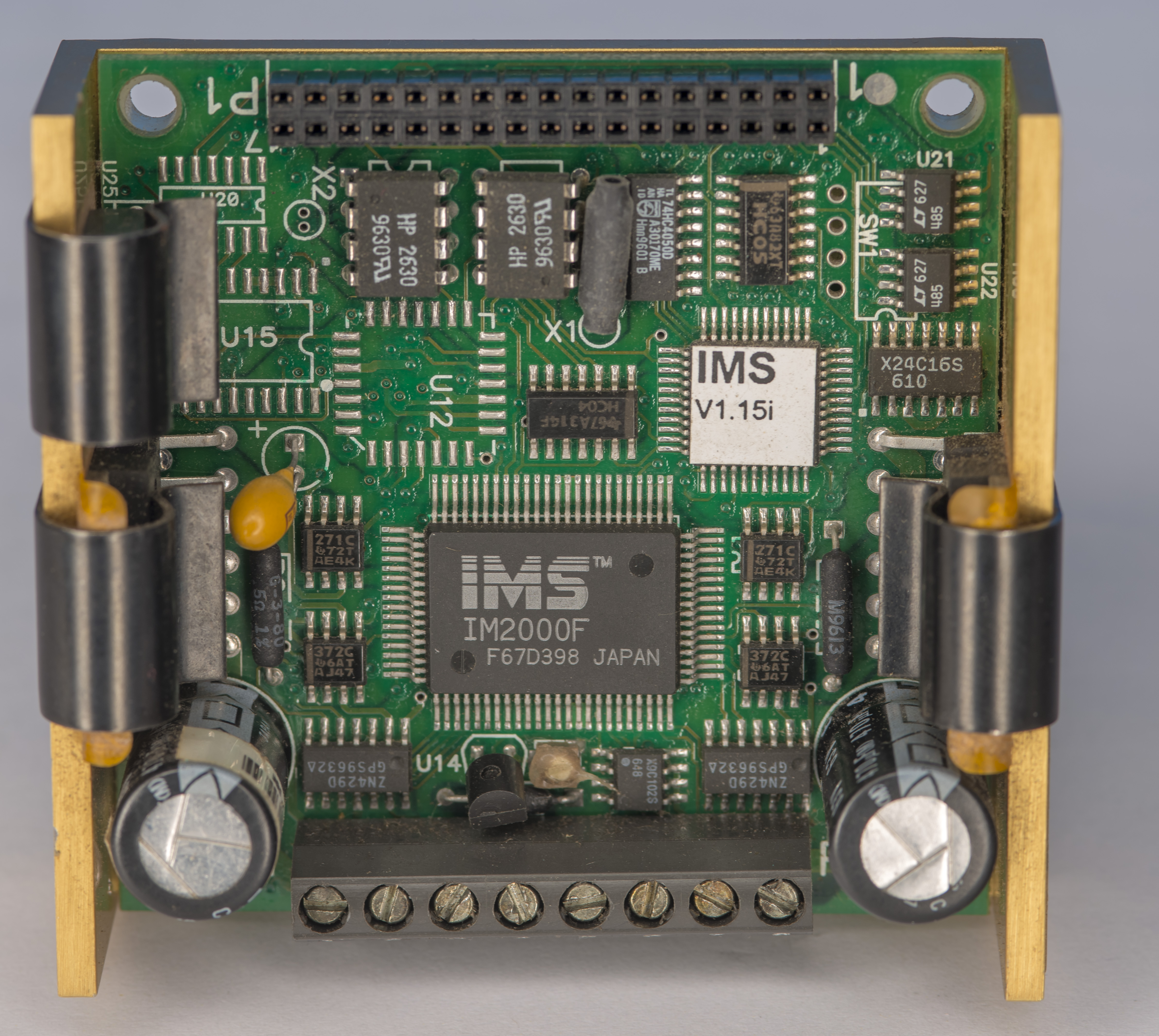
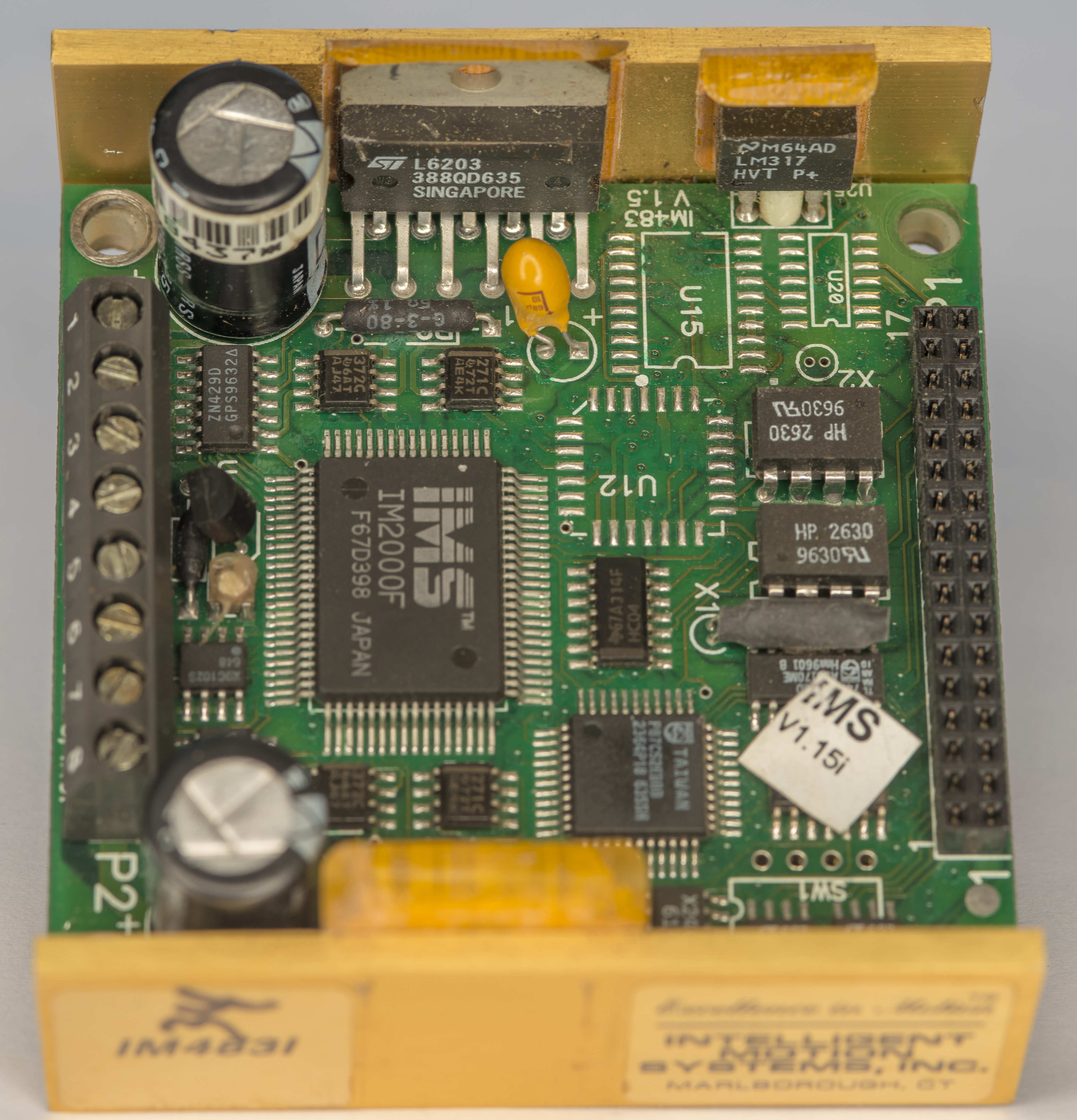
Main core ASIC of the IM483 is IM2000F microstep controller in TSOP package.
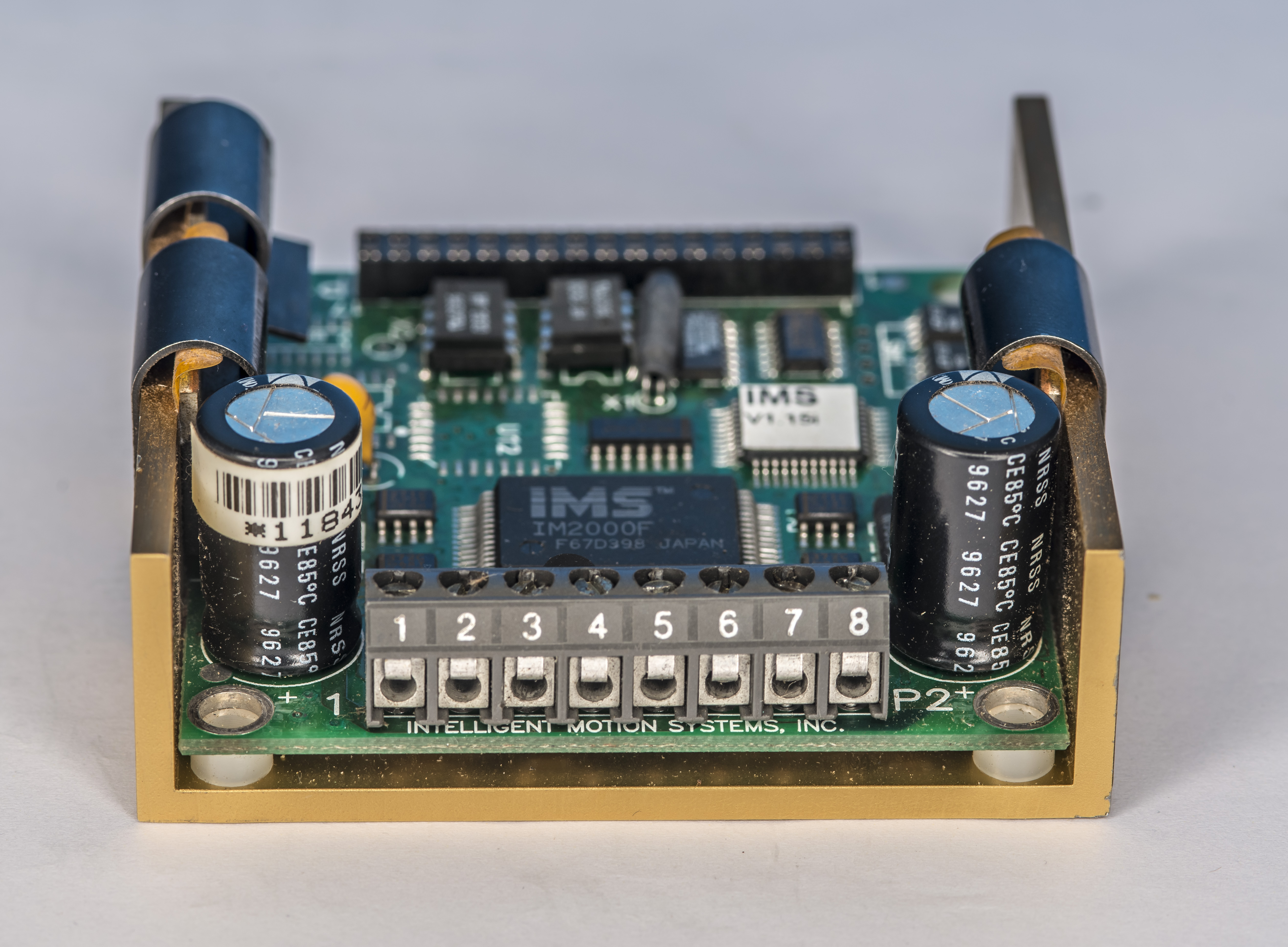
Motor and input power is connected with 8-position screw terminal block. This module supports 4/6 and 8-wire stepper motors. P87C52EBBB is 16MHz OTP-controller with label “IMS V1.15i” stores controller firmware and used as a brains of this device. It contains 256×8 RAM and 8k x 8 EPROM and based on 80C51 micro-architecture.
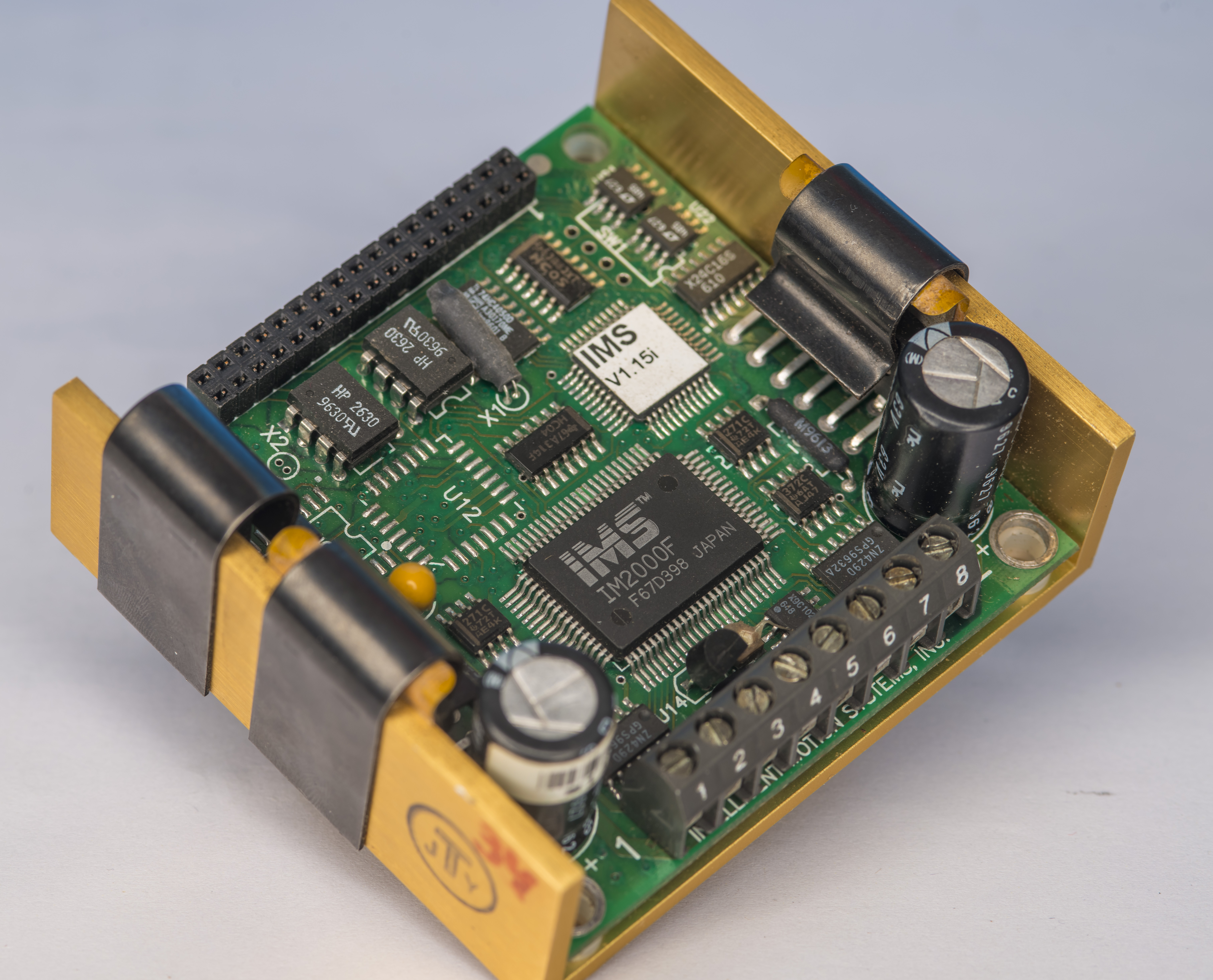
There are few non-populated chips on the PCB, such as U12, U15, U20, X2 and SW1. Few more logic chips are scattered around PCB together with Xicor X24C16P I2C EEPROM.

There are two ST L6203 integrated full-bridge drivers with pair of Texas Instruments TLC271C low-power opamps. GEC Plessey ZN429D is R2R 8-bit DAC. +5V logic level is generated by LM317HVT regulator U25 mounted on the heatsink frame next to one of the ST drivers. Pair of HPCL-2630 used for optical isolation of logic signals.
I’ve powered up this unit with 24V DC supply and connected 4-wire stepper motor. After toggling Jog- and Jog+ to low level I got motor to slowly rotate, so basic functionality is good. Next step would be to hook it up to external RS232/USART micro-controller and try some smooth motion programs.
Stay tuned and let us know your feedback on this post! Discussion about this and related stuff is also welcome in comment section or at our own IRC chat server: xdevs.com (port six-zero-ten-zero, channel: #xDevs.com) or via e-mail.
Projects like this are born from passion and a desire to share how things work. Education is the foundation of a healthy society - especially important in today's volatile world. xDevs began as a personal project notepad in Kherson, Ukraine back in 2008 and has grown with support of passionate readers just like you. There are no (and never will be) any ads, sponsors or shareholders behind xDevs.com, just a commitment to inspire and help learning. If you are in a position to help others like us, please consider supporting xDevs.com’s home-country Ukraine in its defense of freedom to speak, freedom to live in peace and freedom to choose their way. You can use official site to support Ukraine – United24 or Help99. Every cent counts.
Modified: Oct. 15, 2023, 11:23 p.m.